下面这部分讲的是空间力(spatial force),也常叫 wrench(力旋量)。它把三维力 $ \mathbf f $ 和该力对某点的力矩 $ \mathbf n_O $ 合在一起,用一个六维量表示。
一个刚体受到的一般力作用
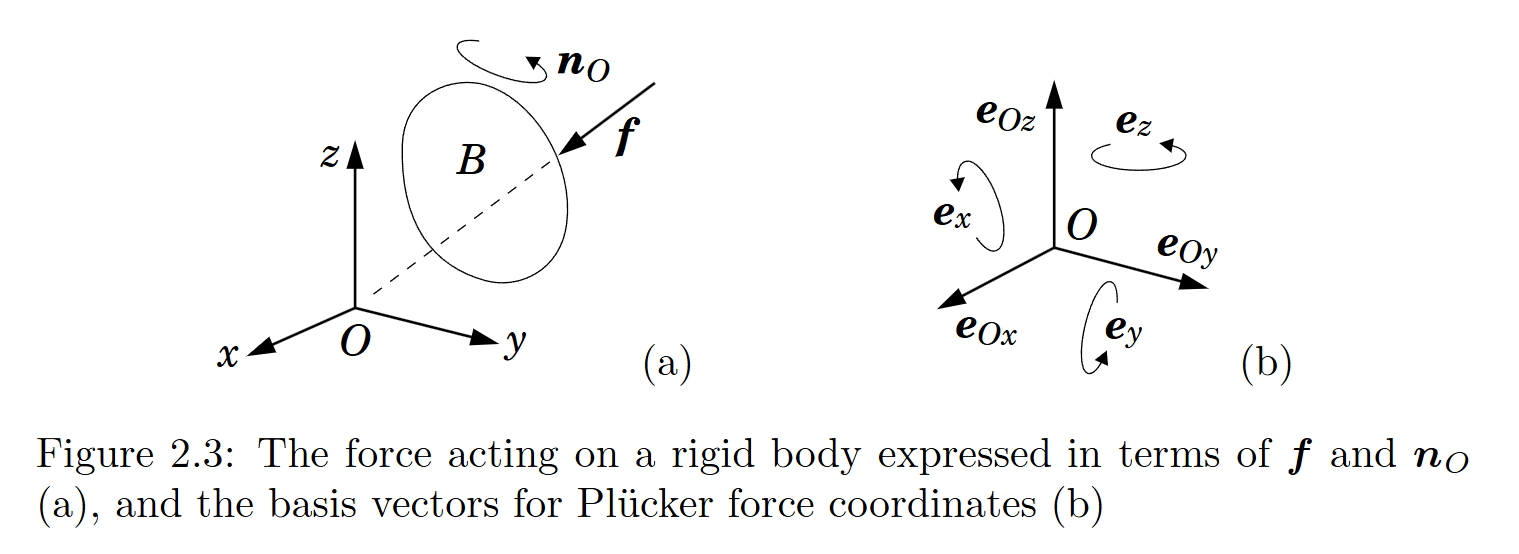
对于刚体B,最一般的外力可以分成两部分: $ \mathbf f $ 和 $ \mathbf n_O $
$ \mathbf f $ : 表示作用在刚体上的合力,方向和大小就是普通三维力。
$ \mathbf n_O $ : 表示该力系关于点 $ O $ 的总力矩,也可以理解为作用在刚体上的力偶矩。
因此,一个空间力可以用下面这一对三维向量描述:
$$ (O,\mathbf n_O,\mathbf f) $$
更本质的说,是用 $ (\mathbf n_O,\mathbf f) $来描述相对于点O的空间力。
这里和空间速度类似:空间速度由角速度 $ \boldsymbol\omega $ 和点 $ O $ 的线速度 $ \mathbf v_O $ 组成;空间力则由力矩 $ \mathbf n_O $ 和线力 $ \mathbf f $ 组成。
为什么力矩依赖参考点
力 ($ \mathbf f $) 本身与选哪个点作为参考点无关,但是力矩与参考点有关。
如果已知力系关于点 (O) 的总力矩为 $ \mathbf n_O $ 那么它关于另一个点 (P) 的总力矩为
$$ \mathbf n_P=\mathbf n_O+\mathbf f\times \overrightarrow{OP}. $$
这里:$ \overrightarrow{OP} $ 表示从点 (O) 指向点 (P) 的位置向量。
这个公式的含义是:同一个力系,如果换一个参考点计算力矩,力矩会增加一项由力 ($ \mathbf f $) 和参考点偏移量产生的附加力矩。
因为叉乘反交换:
$$ \mathbf f\times \overrightarrow{OP} = -\overrightarrow{OP}\times \mathbf f. $$
所以这个公式也常见地写成:
$$ \mathbf n_P=\mathbf n_O-\overrightarrow{OP}\times \mathbf f. $$
两种写法等价。
坐标展开
现在在点 O 建立笛卡尔坐标系
$$ Oxyz $$
其正交单位基为 $ {\mathbf i,\mathbf j,\mathbf k}. $
那么力矩 $ \mathbf n_O $ 可以展开为:
$$ \mathbf n_O = n_{Ox}\mathbf i+n_{Oy}\mathbf j+n_{Oz}\mathbf k. $$
力 $ \mathbf f $ 可以展开为:
$$ \mathbf f = f_x\mathbf i+f_y\mathbf j+f_z\mathbf k. $$
其中:
$$ n_{Ox},n_{Oy},n_{Oz} $$
是关于 O 点的力矩分量;
$$ f_x,f_y,f_z $$
是线力分量。
六个基本空间力
空间力可以看成六个基本力的线性组合。
前三个是单位力偶:
$$ \mathbf e_x,\mathbf e_y,\mathbf e_z $$
分别表示绕 (x,y,z) 方向的单位力矩。
后三个是单位线力:
$$ \mathbf e_{Ox},\mathbf e_{Oy},\mathbf e_{Oz} $$
分别表示沿 (Ox,Oy,Oz) 三条直线作用的单位线力。
因此定义 Plücker 力坐标基:
$$ \mathcal E_O= {\mathbf e_x,\mathbf e_y,\mathbf e_z, \mathbf e_{Ox},\mathbf e_{Oy},\mathbf e_{Oz}} \subset \mathbb F^6. $$
这个基的顺序很重要:前三个对应力矩,后三个对应力。
空间力向量的表达式
空间力向量记为
$$ \hat{\mathbf f} $$
它可以写成六个基向量的线性组合:
$$ \hat{\mathbf f} = n_{Ox}\mathbf e_x +n_{Oy}\mathbf e_y +n_{Oz}\mathbf e_z +f_x\mathbf e_{Ox} +f_y\mathbf e_{Oy} +f_z\mathbf e_{Oz}. $$
它的结构可以看成:
$$ \underline{\hat{\mathbf f}}_O = \begin{bmatrix} n_{Ox}\\ n_{Oy}\\ n_{Oz}\\ f_x\\ f_y\\ f_z \end{bmatrix}. $$
也可以紧凑地写成:
$$ \underline{\hat{\mathbf f}}_O = \begin{bmatrix} \underline{\mathbf n}_O\\ \underline{\mathbf f} \end{bmatrix}. $$
为什么说整体是不变的?
文中说:
Each individual term on the right-hand side depends on the position and orientation of (Oxyz), but the expression as a whole is invariant.
意思是:单独看某个分量,例如
$ \mathbf f $ 和 $ \mathbf n_O $
它们当然依赖坐标系。你换一个坐标系,分量数值会变。
但是整个空间力
$$ \hat{\mathbf f} $$
作为一个几何对象,不依赖于你怎么选坐标系。变化的只是它的坐标表示。
这和普通三维向量完全类似。比如一个力 $ \mathbf f $ 本身是客观存在的,但它在不同坐标系中的坐标会不同。空间力也是如此。