这部分是在建立一个概念:刚体的瞬时运动可以用两个 3D 向量完整描述:角速度 $\omega$ 和某个参考点处的线速度 $v_O$
也就是所谓的 spatial velocity / 空间速度
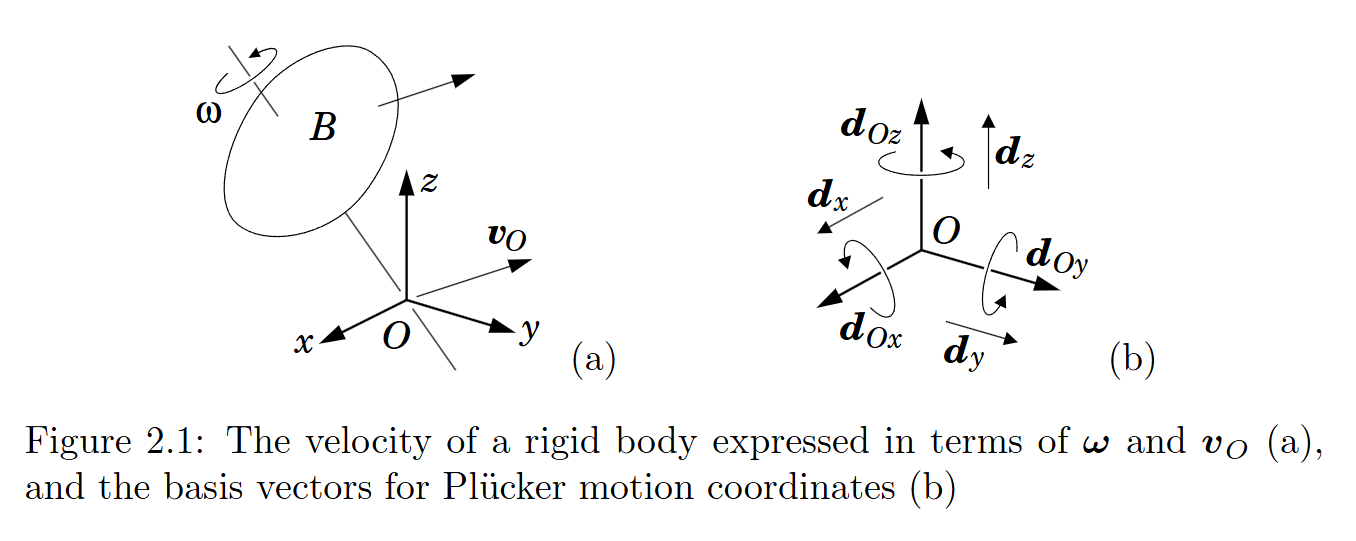
这里通过一个例子开始,参考上图,定义了一个刚体B和一个坐标系O, $ v_O $表示刚体相对于参考系O的线速度, $ ω $表示刚体的角速度。
那么对于刚体上任意一点P的线速度为
$$
v_P = v_O + ω × \overrightarrow{OP}
$$
这里需要理解几点:
- 任意一点P的线速度 $ v_P $和参考坐标系O的位置无关。也就是说 $ v_P $表示的是在同一时刻、同一个刚体运动、同一个点
P的线速度 。坐标系的选择只是为了将$ v_P $表示出来,方便计算等。 - 公式也可以写成 $ v_P - v_O = ω × \overrightarrow{OP} $, 意思是:同一个刚体上两个点的速度差,只来自刚体的旋转。
通过上面我们知道了刚体上任意一点P的线速度,那么如何描述整个刚体的瞬时速度呢?
首先定义坐标系O的三维正交基:
$$ {\mathbf{i}, \mathbf{j}, \mathbf{k}} \subset E^3 $$
所以角速度可以分解为
$$ \boldsymbol{\omega} = \omega_x \mathbf{i} + \omega_y \mathbf{j} + \omega_z \mathbf{k} $$
线速度可以分解为:
$$ \mathbf{v}_O = v_{Ox}\mathbf{i} + v_{Oy}\mathbf{j} + v_{Oz}\mathbf{k} $$
刚体运动可以看成六个基本运动的叠加, 因为角速度有三个分量,线速度也有三个分量,所以刚体瞬时运动可以看成六个基本运动叠加:
$$ \hat{\mathbf v} = (\boldsymbol{\omega} , \mathbf{v}_0) $$
接下来我们考虑刚体运动的计算,两个刚体运动可以相加:
$$ \hat{\mathbf v}_1 = (\boldsymbol{\omega}_1 , \mathbf{v}_{01}) $$
$$ \hat{\mathbf v}_2 = (\boldsymbol{\omega}_2 , \mathbf{v}_{02}) $$
$$ \hat{\mathbf v}_1 + \hat{\mathbf v}_1= (\boldsymbol{\omega}_1 + \boldsymbol{\omega}_2 , \mathbf{v}_{01} + \mathbf{v}_{02}) $$
也可以数乘:
$$ \alpha\hat{\mathbf v} = (\alpha\boldsymbol{\omega} , \alpha\mathbf{v}_0) $$
所以所有刚体瞬时运动满足“向量空间”的基本规则:可以加法、可以数乘。(向量相乘和取模等操作没有意义)
因此我们把这个空间叫做:
$$ \mathbf{M}^6 $$
也就是 motion vector space,运动向量空间。
接下来如何将$ \hat{\mathbf v} = (\boldsymbol{\omega} , \mathbf{v}_0) $写成坐标,方便计算和编程?例如现在有一个刚体在运动,我们如何数值上量化出来?如何把“一个刚体运动”变成“可计算的 6 个数” ?
这时必须选择一组基底。
一个向量本身是没有意义的, 除非你知道它是相对于哪组基写的。 就像一个平移向量,必须知道是相对于哪个原点的平移,否则就没有意义。
速度向量是基于 Plücker 基 :
$$ \mathcal D_O = { \mathbf d_{Ox}, \mathbf d_{Oy}, \mathbf d_{Oz}, \mathbf d_x, \mathbf d_y, \mathbf d_z } $$
来表示:
$$ \hat{v} = \omega_x\mathbf d_{Ox} + \omega_y\mathbf d_{Oy} + \omega_z\mathbf d_{Oz} + v_{Ox}\mathbf d_x + v_{Oy}\mathbf d_y + v_{Oz}\mathbf d_z $$
写成矩阵形式:
$$ \underline{\hat{v}}_O = \begin{bmatrix} \omega_x \\ \omega_y \\ \omega_z \\ v_{Ox} \\ v_{Oy} \\ v_{Oz} \end{bmatrix} = \begin{bmatrix} \underline{\boldsymbol{\omega}} \\ \underline{\mathbf v}_O \end{bmatrix} $$
这里的下标 O很重要 ,表达的就是 这个空间速度是用以O为原点的 Plücker 坐标系来表示的。
如果换一个坐标原点P,那么角速度不变,线速度会发生变化。
因为
$$ \mathbf v_P = \mathbf v_O + \boldsymbol{\omega} \times \overrightarrow{OP} $$
这里每一项都依赖坐标系 $ O_{xyz} $, 如果换成坐标系 $ P_{xyz} $, 数值上可能会发生变化,但是真实表达的运动是不变的。
空间速度描述整个刚体的速度场;角速度是这个速度场的全局旋转部分,所以不随参考点变;线速度部分是“所选参考点处的点速度”,参考点换了,取的点不同,所以线速度分量会变。